SamurAI Coding 2017-18 writeup
こんにちは、@ninjaです。
新歓ブログリレー中ですがこの記事は特に関係ないです。
3/14日に開催されたSamurAI Coding 2017-18の本戦に参加してきました。
SamurAI Codingは侍をテーマにしたゲームのAIを作成して、その強さを競うプログラミングコンテストです。
今回はSamurAI Jockeyというレースゲームで試合が行われました。
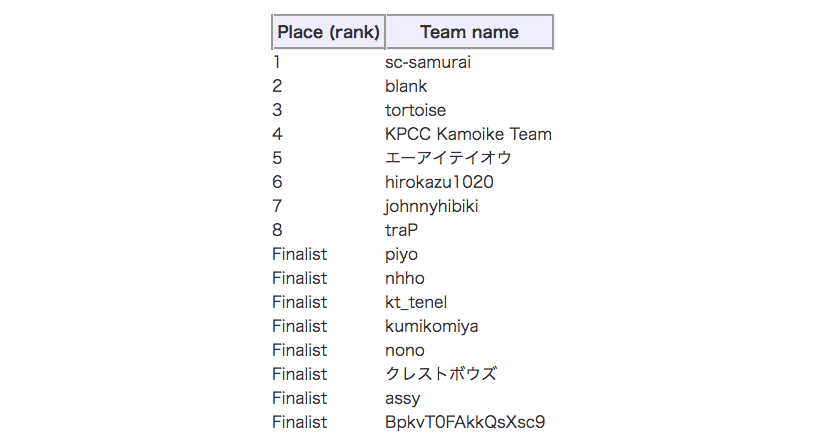
結果
予選は14位でした。
本戦のトーナメントは2回戦敗退で8位でした。
プログラム
基本的にはビームサーチを用いました。
予選
相手は位置のみを考慮しました。
評価関数にはゴールまでの(障害物等を考慮した)距離を用いています。
本戦
予選では相手の動きを考慮していませんでしたが、予選の結果がギリギリだったので相手の動きを考慮することにしました。
相手に同じ評価関数で動きを予測して、自分の探索時に衝突を評価に加えるようにしました。
コード
/* SamurAI coding 2018
* team: traP
*/
#include <algorithm>
#include <iostream>
#include <map>
#include <math.h>
#include <set>
#include <vector>
using namespace std;
struct DistNode {
int x, y, d;
};
bool operator<(const DistNode &lhs, const DistNode &rhs) {
return lhs.d < rhs.d;
}
struct OpponentState {
int x, y, vx, vy;
};
struct Node {
int x, y, vx, vy, from, id, coli, d;
};
/* Nodeの評価関数
* 評価優先度:
* (視界外距離が小さい) > (衝突回数が少ない) > (yの速さが大きい)
*/
bool operator<(const Node &lhs, const Node &rhs) {
if (lhs.d == rhs.d) {
if (lhs.coli == rhs.coli) {
if (lhs.vy > 0)
return lhs.vy < rhs.vy;
else
return lhs.vy > rhs.vy;
}
return lhs.coli < rhs.coli;
}
return lhs.d < rhs.d;
}
// マップ格納用
vector<vector<bool>> mp;
// 視界内距離用
vector<vector<int>> dist;
long long t, s;
int w, l, d;
// ビーム幅, 先読み手数
int beam = 600, pre = 7, maxSpeed = 8;
int gcd(int a, int b) {
if (a % b == 0)
return b;
return gcd(b, a % b);
}
int getDist(vector<vector<int>> &vec, int y, int x) {
if (y < 0)
return 1000000;
if (y > d * 2)
return d * 2 - y;
return vec[y][x];
}
// 互いに素なvx, vyに対して衝突判定を行う
bool innerCollision(int x, int y, int vx, int vy) {
if (mp[y + vy][x + vx])
return true;
if (vy == 0 || vx == 0) {
return false;
}
double f = (double)vy / vx;
int diff = vx / abs(vx);
double g = f * diff / 1000;
for (int i = 0; i != diff * abs(vx); i += diff) {
if (mp[y + (int)(ceil(g))][x + i] && mp[y + (int)(floor(g))][x + i]) {
return true;
}
if (mp[y + (int)(ceil(g))][x + i + diff] &&
mp[y + (int)(floor(g))][x + i]) {
return true;
}
if (mp[y + (int)(ceil(g))][x + i] &&
mp[y + (int)(floor(g))][x + i + diff]) {
return true;
}
g += f * diff;
}
g = 0;
f = (double)vx / vy;
diff = vy / abs(vy);
g += f * diff / 1000;
for (int i = 0; i != diff * abs(vy); i += diff) {
if (mp[y + i][x + (int)(ceil(g))] && mp[y + i][x + (int)(floor(g))]) {
return true;
}
if (mp[y + i + diff][x + (int)(ceil(g))] &&
mp[y + i][x + (int)(floor(g))]) {
return true;
}
if (mp[y + i][x + (int)(ceil(g))] &&
mp[y + i + diff][x + (int)(floor(g))]) {
return true;
}
g += f * diff;
}
return false;
}
// マップとの当たり判定
bool collision(int x, int y, int vx, int vy) {
if (y > l) {
return false;
}
int ax, ay;
if (vx == 0 && vy == 0) {
return false;
}
int v;
if (vx == 0) {
ax = 0;
ay = vy / abs(vy);
v = abs(vy);
}
if (vy == 0) {
ax = vx / abs(vx);
ay = 0;
v = abs(vx);
}
if (vx != 0 && vy != 0) {
v = gcd(abs(vx), abs(vy));
ax = vx / v;
ay = vy / v;
}
for (int i = 0; i < v; i++) {
if (innerCollision(x, y, ax, ay))
return true;
x += ax;
y += ay;
}
return false;
}
// 静止している相手との判定
bool collideOpponent(int x, int y, int vx, int vy, int ex, int ey) {
int evx, evy;
if (vx != 0 && vy != 0) {
int gxy = gcd(abs(vx), abs(vy));
evx = vx / gxy;
evy = vy / gxy;
} else if (vy != 0) {
evy = vy / abs(vy);
evx = 0;
} else if (vx != 0) {
evx = vx / abs(vx);
evy = 0;
} else {
evx = 0;
evy = 0;
}
int ivx = evx, ivy = evy;
while (true) {
if (x + ivx == ex && y + ivy == ey) {
return true;
}
if (ivx == vx && ivy == vy)
break;
ivx += evx;
ivy += evy;
}
return false;
}
// 移動中交差判定
// 0: なし
// 1: 優先権あり交差
// -1: 優先権なし交差
int collideMovingOpponent(int x, int y, int vx, int vy, int ex, int ey, int evx,
int evy) {
bool hasPriority;
if (y == ey)
hasPriority = x < ex;
else
hasPriority = y < ey;
int x1 = x, x2 = x + vx, y1 = y, y2 = y + vy;
int x3 = ex, x4 = ex + evx, y3 = ey, y4 = ey + evy;
int a = (x3 - x4) * (y1 - y3) + (y3 - y4) * (x3 - x1);
int b = (x3 - x4) * (y2 - y3) + (y3 - y4) * (x3 - x2);
int c = (x1 - x2) * (y3 - y1) + (y1 - y2) * (x1 - x3);
int d = (x1 - x2) * (y4 - y1) + (y1 - y2) * (x1 - x4);
if (c * d < 0 && a * b < 0) {
if (hasPriority)
return 1;
else
return -1;
} else {
return 0;
}
}
int hx[9] = {1, 1, 1, 0, 0, 0, -1, -1, -1};
int hy[9] = {1, 0, -1, 1, 0, -1, 1, 0, -1};
// 状態のハッシュ
long long h(long long a, long long b, long long c, long long d) {
return ((a + 200) << 48) | ((b + 200) << 32) | ((c + 200) << 16) | (d + 200);
}
int main() {
// 初期化処理
cin >> t >> s >> w >> l >> d;
cout << 0 << endl;
mp.resize(l + 100);
for (int i = 0; i < l + 100; i++)
mp[i].resize(w);
dist.resize(d * 2 + 1);
for (int i = 0; i < d * 2 + 1; i++)
dist[i].resize(w);
maxSpeed = min(maxSpeed, d - 1);
// ターン処理
while (true) {
int ss, tt;
cin >> ss >> tt;
int x, y, vx, vy;
cin >> x >> y >> vx >> vy;
int ex, ey, evx, evy;
cin >> ex >> ey >> evx >> evy;
for (int i = 0; i < d * 2 + 1; i++) {
vector<int> v(w);
for (int j = 0; j < w; j++)
cin >> v[j];
if (y - d + i >= 0) {
for (int j = 0; j < w; j++)
mp[y - d + i][j] = (v[j] == 1);
}
}
// 各座標のゴールからの距離
for (int i = 0; i < d * 2 + 1; i++) {
for (int j = 0; j < w; j++)
dist[i][j] = 10000000;
}
// マップ幅探索用キュー
multiset<DistNode> dq;
for (int i = 0; i < w; i++) {
if (!mp[min(l, y + d)][i]) {
DistNode ds{i, min(l, y + d), 0};
dq.insert(ds);
}
}
int searchMinY = max(0, y - d), searchMaxY = y + d;
int distOffset = -y + d;
// 幅優先探索
// 見えている範囲の外に行くまでの最短距離
while (dq.size() > 0) {
DistNode now = *dq.begin();
dq.erase(dq.begin());
if (dist[now.y + distOffset][now.x] <= now.d)
continue;
dist[now.y + distOffset][now.x] = now.d;
for (int i = 0; i < 9; i++) {
if (i == 4)
continue;
int nx = now.x + hx[i], ny = now.y + hy[i];
if (nx < 0 || nx >= w || ny < searchMinY || ny > searchMaxY)
continue;
if (mp[ny][nx])
continue;
/*/
int hx[9] = {1, 1, 1, 0, 0, 0, -1, -1, -1};
int hy[9] = {1, 0, -1, 1, 0, -1, 1, 0, -1};
/*/
if (i == 0 || i == 2 || i == 6 || i == 8) {
if (mp[ny][now.x] && mp[now.y][nx])
continue;
}
if (ny + distOffset < 0 || ny + distOffset > 2 * d)
continue;
DistNode next{nx, ny, now.d + 1};
if (dist[ny + distOffset][nx] <= next.d)
continue;
dq.insert(next);
}
}
/*/
for (int i = 0; i < d * 2 + 1; i++) {
for (int j = 0; j < w; j++)
if (dist[i][j] > 1000)
cout << "* ";
else
cout << dist[i][j] << " ";
cout << endl;
}
/*/
// 状態格納配列[先読み数][]
vector<vector<Node>> qs(pre + 1);
// 相手の状態予測
vector<OpponentState> oss(pre + 1);
for (int i = 0; i < pre + 1; i++)
oss[i] = OpponentState{0, -1, 0, 0};
// 相手が見えているとき
if (ey >= 0) {
Node es{ex, ey, evx, evy, -1, -1, 0, dist[ey + distOffset][x]};
oss[0].x = ex;
oss[0].y = ey;
oss[0].vx = evx;
oss[0].vy = evy;
qs[0].push_back(es);
map<long long, bool> check;
int nowPre = pre;
// ビームサーチ
for (int i = 0; i < nowPre; i++) {
if (qs[i].size() == 0) {
nowPre = i - 1;
break;
}
sort(qs[i].begin(), qs[i].end());
for (int j = 0; j < (int)min((unsigned long)beam, qs[i].size()); j++) {
if (qs[i][j].d <= 0) {
nowPre = i;
break;
}
for (int k = 0; k < 9; k++) {
int ny = qs[i][j].y + qs[i][j].vy + hy[k];
int nx = qs[i][j].x + qs[i][j].vx + hx[k];
Node next{nx,
ny,
qs[i][j].vx + hx[k],
qs[i][j].vy + hy[k],
k,
j,
qs[i][j].coli,
getDist(dist, ny + distOffset, nx)};
// 現在の自分の位置への移動
if (i == 0) {
if (collideOpponent(ex, ey, next.vx, next.vy, x, y)) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.coli++;
next.d = getDist(dist, next.y + distOffset, next.x);
if (next.vy > maxSpeed)
continue;
if (check[h(next.x, next.y, next.vx, next.vy)])
continue;
check[h(next.x, next.y, next.vx, next.vy)] = true;
qs[i + 1].push_back(next);
continue;
}
}
// コースアウト
if (next.x < 0 || next.x >= w || next.y < 0) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.coli++;
next.d = getDist(dist, next.y + distOffset, next.x);
if (next.vy > maxSpeed)
continue;
if (check[h(next.x, next.y, next.vx, next.vy)])
continue;
check[h(next.x, next.y, next.vx, next.vy)] = true;
qs[i + 1].push_back(next);
continue;
}
// 障害物との接触
if (collision(qs[i][j].x, qs[i][j].y, next.vx, next.vy)) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.d = getDist(dist, next.y + distOffset, next.x);
next.coli++;
}
if (next.vy > maxSpeed)
continue;
if (check[h(next.x, next.y, next.vx, next.vy)])
continue;
check[h(next.x, next.y, next.vx, next.vy)] = true;
qs[i + 1].push_back(next);
}
}
}
sort(qs[nowPre].begin(), qs[nowPre].end());
oss[nowPre] = OpponentState{qs[nowPre][0].x, qs[nowPre][0].y,
qs[nowPre][0].vx, qs[nowPre][0].vy};
int id = qs[nowPre][0].id;
for (int i = nowPre - 1; i > 0 && id >= 0; i--) {
oss[i] =
OpponentState{qs[i][id].x, qs[i][id].y, qs[i][id].vx, qs[i][id].vy};
id = qs[i][id].id;
}
oss[0] = OpponentState{ex, ey, evx, evy};
for (int i = 0; i < pre + 1; i++)
qs[i].clear();
}
Node start{x, y, vx, vy, -1, -1, 0, dist[y + distOffset][x]};
qs[0].push_back(start);
// 状態重複チェック用
map<long long, bool> check;
int nowPre = pre;
// ビームサーチ
for (int i = 0; i < nowPre; i++) {
sort(qs[i].begin(), qs[i].end());
for (int j = 0; j < (int)min((unsigned long)beam, qs[i].size()); j++) {
if (qs[i][j].d <= 0) {
nowPre = i;
break;
}
for (int k = 0; k < 9; k++) {
int ny = qs[i][j].y + qs[i][j].vy + hy[k];
int nx = qs[i][j].x + qs[i][j].vx + hx[k];
Node next{
nx, ny, qs[i][j].vx + hx[k], qs[i][j].vy + hy[k],
k, j, qs[i][j].coli, getDist(dist, ny + distOffset, nx)};
// 相手の位置への移動
if (collideOpponent(qs[i][j].x, qs[i][j].y, next.vx, next.vy,
oss[i].x, oss[i].y)) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.coli++;
next.d = getDist(dist, next.y + distOffset, next.x);
qs[i + 1].push_back(next);
continue;
}
// 相手との交差
if (oss[i].y >= 0 && oss[i + 1].y >= 0) {
int cmo = collideMovingOpponent(
qs[i][j].x, qs[i][j].y, next.vx, next.vy, oss[i].x, oss[i].y,
oss[i + 1].x - oss[i].x, oss[i + 1].y - oss[i].y);
if (cmo < 0) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.coli++;
next.d = getDist(dist, next.y + distOffset, next.x);
qs[i + 1].push_back(next);
continue;
} else if (cmo > 0) {
next.coli--;
}
}
// コースアウト
if (next.x < 0 || next.x >= w || next.y < 0) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.coli++;
next.d = getDist(dist, next.y + distOffset, next.x);
if (next.vy > maxSpeed)
continue;
if (check[h(next.x, next.y, next.vx, next.vy)])
continue;
check[h(next.x, next.y, next.vx, next.vy)] = true;
qs[i + 1].push_back(next);
continue;
}
// 障害物との接触
if (collision(qs[i][j].x, qs[i][j].y, next.vx, next.vy)) {
next.x = qs[i][j].x;
next.y = qs[i][j].y;
next.d = getDist(dist, next.y + distOffset, next.x);
next.coli++;
}
if (next.vy > maxSpeed)
continue;
if (check[h(next.x, next.y, next.vx, next.vy)])
continue;
check[h(next.x, next.y, next.vx, next.vy)] = true;
qs[i + 1].push_back(next);
}
}
}
/*/
cout << "search: ";
for (int m = 0; m < pre + 1; m++) {
cout << qs[m].size() << " ";
}
cout << endl;
cout << nowPre + 1 << " turn after " << qs[nowPre][0].x << " "
<< qs[nowPre][0].y << endl;
/*/
sort(qs[nowPre].begin(), qs[nowPre].end());
int id = qs[nowPre][0].id;
/*/
cout << "out : (" << hx[qs[nowPre][0].from] << "," << hy[qs[nowPre][0].from]
<< ") ";
cout << "(" << qs[nowPre][0].x << "," << qs[nowPre][0].y << " "
<< qs[nowPre][0].d << ") ";
/*/
for (int i = nowPre - 1; i > 1; i--) {
/*/
cout << "(" << hx[qs[i][id].from] << "," << hy[qs[i][id].from] << ") ";
cout << "(" << qs[i][id].x << "," << qs[i][id].y << " " << qs[i][id].d
<< ") ";
/*/
id = qs[i][id].id;
}
/*/
cout << "(" << hx[qs[1][id].from] << "," << hy[qs[1][id].from] << ")";
cout << "(" << qs[1][id].x << "," << qs[1][id].y << " " << qs[1][id].d
<< ")" << endl;
/*/
int from = qs[1][id].from;
cout << hx[from] << " " << hy[from] << endl;
}
return 0;
}